|
The MPR model was used to successfully develop a discriminant function
to predict conditions that would cause system trips in a computer-controlled
wavemaker machine used for nautical model testing.
The wavemaker received inputs in the form of position (x), velocity
(v) and acceleration (a) for each of two hydraulically operated
wavemaking rams, for a total of six inputs. However the system would
"trip out" under certain situations. The operators could
not identify what combinations of inputs caused trips. Several cases
of trip-out conditions and similar conditions that did not cause
trips were used as input data for modeling. The dependent variable
was a coded pseudo-variable with a value of 1 for "caused a
trip" and 0 for "did not trip". The program was able
to identify a polynomial model discriminating between these cases.
|
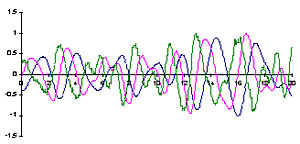
The graph shows x, v and a for one of the test cases.
The second figure shows a plot of the predicted discriminant variable
versus time. The discriminant shows a sharp peak where the function
reaches a value of 1.0, corresponding to the predicted time of the
failure. When the inputs were used in the real wavemaker, the system
caused a trip at exactly 16 seconds, just as predicted.
When the polynomial was used with newly generated
test cases, it was successful in predicting both (a) which test
cases would result in a trip, and (b) when the trip would actually
occur.
|