|
Chaotic time-series are a particularly challenging class of nonlinear
processes. Chaos, in the mathematical sense, has been defined as
"extreme sensitivity to initial conditions."
In a non-chaotic process, if you do two simulations using two
different starting points (represented by points in the "phase
plane") that are close together, the distance between the two
points will decay to zero, stay constant, or increase linearly.
In a chaotic process the distance increases exponentially. Eventually,
the trajectory of the two points will appear unrelated (i.e., uncorrelated).
For example, if you tossed a pair of oranges into a stream, they
would flow together if the stream flow were slow and smooth. But
if it were turbulent, the motion of the two oranges would quickly
become unrelated.
The coefficient of exponential increase in distance between the
points is called the Lyapunov coefficient (°). If ° is negative
or zero for a process, then it is non-chaotic. If ° is positive,
then the process is chaotic.
Chaotic time-series data often look random but aren't. Researchers
studying a process may be interested in determining if "noisy"
behavior is really randomness, or actually deterministic chaos.
This makes a big difference in our ability to make predictions,
because true noise is inherently unpredictable, whereas chaotic
processes can be very predictable (in the short term). Economic
time-series are an example of one type of data that people are interested
in distinguishing chaotic from random behavior.
A technique that proves capable of (a) determining if a process
is chaotic, and (b) developing a predictive model of the processes
may find wide applicability.
A Test Case: The Lorenz Equations
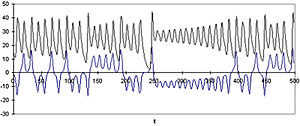
The Lorenz equations are a set of three differential equations
based on a model of heat-driven fluid flow (thermal convection).
The three equations predict the changes in three variables, denoted
by x, y, and z, over time. The figure below shows an example plot
of how x, and z vary with time (y behaves similarly to x, the lower
curve).
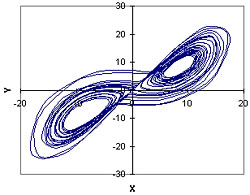
If you plot any two of the variables versus each other, you get
a phase plane plot. Here is an example of a plot of y versus x:
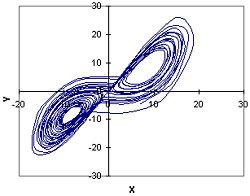
This plot shows the complex phase plane trajectory that never loops
back on itself, explodes to infinity, or converges to a fixed point,
as non-chaotic processes will do. The "butterfly-shaped"
region containing the chaotic trajectories in the phase plane is
called an attractor.
Using MPR to Identify Chaos
The MPR model was found to be able to identify the nonlinear dynamic
behavior of the Lorenz equations, as reflected in the geometry of
the attractor and by calculation of its Lyapunov exponents. The
technique was applied to times series data obtained from simulations
of the Lorenz equations with and without measurement noise.
|
The Lorenz equations were used to generate a time-series of values
of x, y, and z. Then, an MPR model was developed to predict each
variable, using only lag-1 values of x, y, and z. That is, three
MPR models were generated:



For example, a portion of the equation for x is (the subscript
i-1 is dropped on the right side for simplicity):
xi = x + 3.4070×10-7×xz5 + 4.7659×10-1×y
- 3.4949×10-3×xz2 - 1.5647 ×10-4×x3 + .
. .
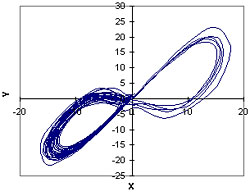
Then, using these models alone (without reference to the original
data or the original Lorenz equations), a new sequence of values
of x, y, and z were generated. When x was plotted versus y, the
following trajectory was obtained:
You can see that it has the same appearance of the phase-plane
trajectory of the Lorenz equations. Even if random noise was added
to the data before modeling (at a level of approximately 10% of
the variance of the data), an approximation to the Lorenz attractor
could still be recovered from the data, although additional lags
(lag 1, 2, and 3) had to be used. The resulting attractor still
has the butterfly geometry:
A final test was to compute the Lyapunov coefficients of the MPR
models and compare them to the known values of the Lorenz equations.
Three values could be computed for this system. The values for the
MPR models were computed using a standard procedure (Wolf, 1986).
The results are:
| |
 |
 |
 |
| Lorenz
equations |
1.30 |
-0.002 |
-20.7 |
| MPR,
no noise |
1.33 |
-0.065 |
-21.3 |
| MPR,
with noise |
1.09 |
-0.46 |
-18.0 |
This shows that the MPR models accurately reproduced the Lyapunov
coefficients in the case of the model fitted to the noise-free data.
In the case of the noisy data, the first and third coefficients
were predicted with reasonable accuracy, although the second is
inaccurate. However, it is the first coefficient, the positive one,
which shows the chaotic nature of the process, and dominates the
behavior of the system.
The MPR models were developed from the data, and not using the
Lorenz equations themselves. And yet they could be used to reproduce
both the phase plane trajectory and the Lyapunov coefficients of
the original equations. This illustrates the power of MPR to discover
relationships underlying the data, including the dynamic behavior
of the process, and to distinguish noise from chaos.
In turn, this demonstrates the capability of MPR to model some
of the most challenging types of processes.
|